情報科学領域
仮想物理空間で訓練された建設ロボットの自動掘削 AI の公開動作実験
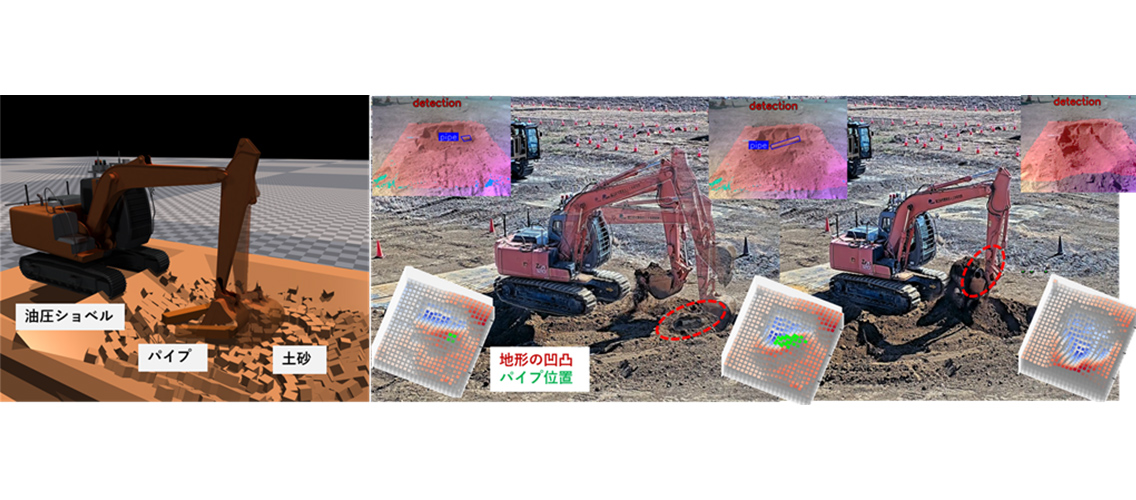
自然災害現場などの過酷な環境で活躍する建設ロボットは、遠隔操縦を基本としますが、自動掘削の機能が搭載されれば、応急復旧の効率が大きく飛躍することが期待できます。しかしながら、自然災害現場には、掘削する対象に、掘削の障害となるものが埋まっている可能性が大きいです。例えば、本プロジェクトが対象とする河道閉塞(大雨や地震の後に崖崩れが発生し、川の流れがせき止められてしまう現象)現場には、倒木が埋まっている可能性もあり、掘削動作を妨げる可能性があります。そこで、本研究では、建設ロボットによる地面の掘削中に、倒木に見立てたパイプを地中に発見した際、これを排除する動作を行うことが可能な自動掘削 AI を開発しました。
詳細はこちら:https://www.naist.jp/pressrelease/250707.pdf