ポイント
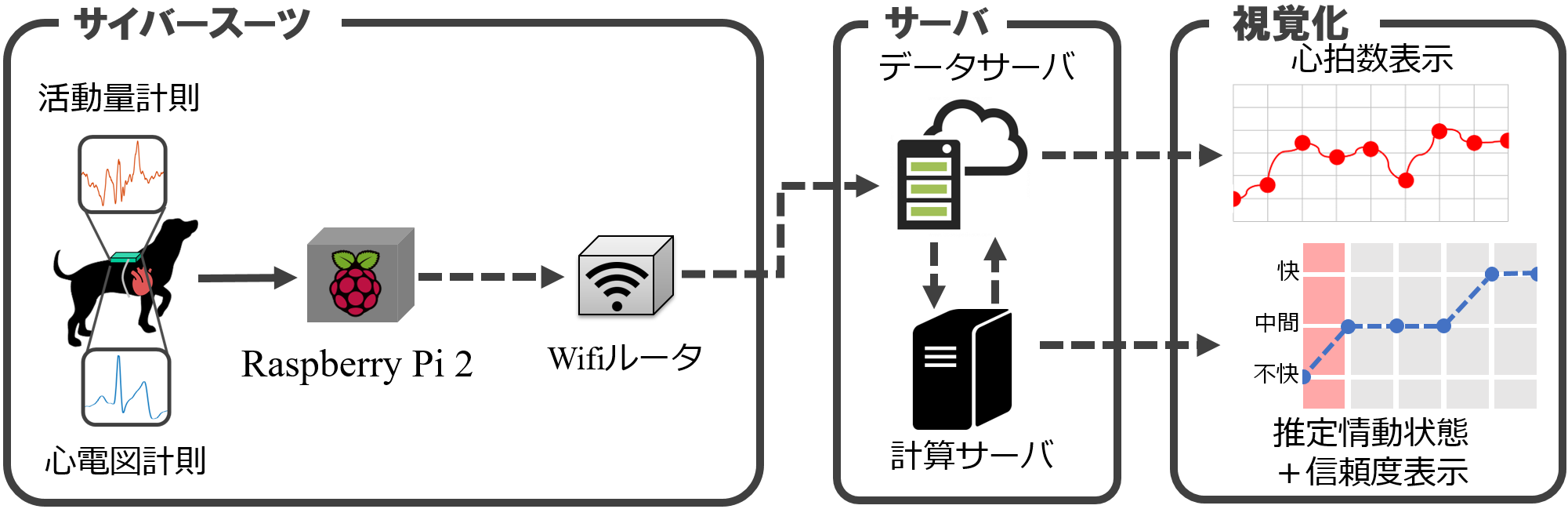
- 新たに開発したサイバースーツで計測する心電と運動の情報により、救助犬の活動中の活性度(快/不快の情動)を、その信頼度とともに推定することに成功しました(世界初)。
- タブレット端末などに表示することにより、災害救助活動中の犬の情動をリアルタイムに遠隔モニタリングすることが可能です。
-
これまでは飼い主の感覚でしか判断出来なかった犬の快/不快の情動を、他者が客観的に判断できることで、情動が快の時に集中的に捜索を実施し、不快の時は休憩を取らせるなど、救助犬を効果的に運用することができます。
研究概要
内閣府 総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの一環として、情報科学研究科の池田 和司教授、久保 孝富特任准教授らの研究グループは、東北大学、麻布大学、熊本大学、京都女子大学と共同で、「犬の情動をリアルタイム推定するサイバースーツ」の開発に成功しました。
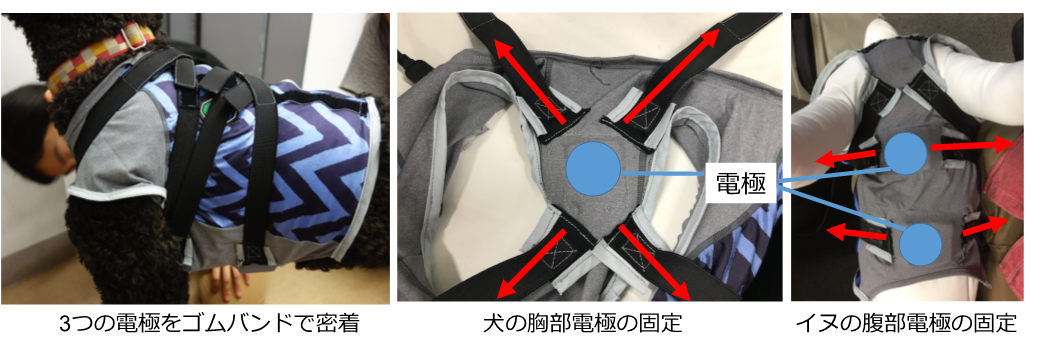
従来は困難であった、犬の活動中の心電計測が可能になると同時に、心電から得られる心拍変動指標(HRV)と慣性センサの情報を融合することで、運動中の快/不快の情動とそれが信頼できるかを判定し、タブレット端末などにリアルタイムに表示することが可能になりました。災害救助犬に装着することで、犬を適切なタイミングで休ませたり、集中できる状態で仕事をさせたりすることで、災害現場での被災者捜索の信頼性を向上させることが期待されます。
本成果は、以下の事業・研究プロジェクトによって得られました。
- 内閣府 革新的研究開発推進プログラム(ImPACT)
http://www.jst.go.jp/impact/
プログラム・マネージャー:田所 諭
研究開発プログラム:タフ・ロボティクス・チャレンジ
研究開発課題1:サイバー救助犬の研究開発
(研究開発責任者:大野 和則、研究期間:平成26年度〜平成30年度)
研究開発課題2:災害救助犬や探知犬の作業と心身の可視化システム開発
(研究開発責任者:菊水 健史、研究機関:平成27年度〜平成30年度)
これらの研究開発課題では、ロボット技術を利用して災害救助犬の探査能力を支援・強化するサイバースーツの開発に取り組んでいます。